All About Fish Finders
Topic 01 - Invention of the fish finder
In 1948, a device for detecting fish underwater was developed in Nagasaki,
Japan. The Furuno brothers, Kiyotaka and Kiyokata, the owners of a small
marine electrical company in a small port of Japan, developed this amazing new
technology.
One day, an experienced fisherman talked to the brothers "I know where fish
are. And I can guess its quantity, too!" This private talk between the Furuno
brothers and the fisherman provided Kiyotaka an inspiration of developing a
fish finder. "Air bubbles.� said the fisherman, �When air bubbles rise to the
sea surface, it means there is fish school down below.� - This was the secret
for fishing. It was a well-known fact that a sound wave reflects when it hits
against a bubble, what Kiyotaka instantly thought was that it can be used for
detecting bubbles in order to find fish. This conversation with the
experienced fisherman had become an important trigger for developing fish
finders.
Kiyotaka, the older brother at the age of 16, started developing a fish
finder using scrap materials, and repeated the experiment. Kiyokata, the
younger brother, took the prototype onboard, and put it to the test again and
again. In the early days of development, it didn�t work as well as they
expected. Many times Kiyokata was thrown overboard by the angry captain, as
Kiyotaka thought he found a fish school, which really was a swarm of
jellyfish. However, gradual improvement of the equipment lead to successfully
finding fish. The positive results gradually changed the fishermen's attitude
toward the brothers. As a tester and an instructor of fish finder, Kiyokata
went on various vessels, which resulted in enough great catches to prove the
performance of their fish finder. Eventually Kiyokata was nicknamed as the
"god of sardine" since he became able to successfully find fish schools
everywhere.
The invention of the fish finder was the materialization of an engineering
primitive seed - a boy's dream of "how wonderful if I could see underwater."
It has been already more than 60 years since the first fish finder was
introduced in the market. Before this technology was available, fishermen
depended solely on their intuition and experience. However, the Furuno
brothers� fish finder dramatically changed fishing into a modern, scientific
operation.

The early model of fish finder
- The world's first practical fish finder commercialized -
The world's first fish finder was commercialized by the Furuno brothers in
1948 in Nagasaki, Japan. The early model was a pen recorder that utilized
specially processed recording paper to record the found objects underwater.
The operation was very easy, it only had a power switch, a sensitivity
adjustment and a search range selector.
Topic 02 - How they work?
A fish finder helps detect a fish school and provides various underwater
information, such as water depth, distribution of fish school, and the
condition of the seabed by transmitting ultrasonic waves into the sea and
receiving its reflection. Part of sonic or ultrasonic waves, which have been
transmitted, reflect back to the source when they hit an object (e.g. fish
school or seabed). A fish finder uses this ultrasonic reflection
characteristic.
The ultrasonic waves from the fish finder are transmitted directly
underneath the boat. If they hit a fish school, very weak reflections will
come back to where the ultrasonic waves were originally transmitted. The
reflection received is converted into an electrical signal and subsequently
sent to the receiving circuit of the fish finder. The receiving circuit
amplifies the weak signals, and the processor unit processes them to generate
images to be displayed on the screen. As the result, the image will be
displayed on the color LCD. Stronger reflections are shown in orange or red,
and weaker ones are shown in green or blue on the screen. A fish school of
high density or rocks on the seabed return stronger signals, so they will be
shown in a reddish color, while a fish school of low density or small fish
will be shown in a bluish color. The color presentation can clearly illustrate
the undersea condition.

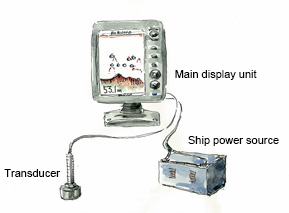
A fish finder consists of two parts: main unit (with a screen) and
transducer. The main unit should be located where it can be easily accessed in
the cabin or wheelhouse, etc. The transducer should be mounted on the boat's
bottom either through hull or in-hull installation. Please bear in mind that
the performance of a fish finder depends largely on whether the transducer is
properly mounted on the boat's bottom. An improperly mounted transducer may
result in failure in capturing reflected waves or other serious defects. To
avoid these troubles, you should consult with a technical dealer on how to
properly install the transducer prior to actual installation.

Overview of operating mechanism of
fish finder
A fish finder transmits ultrasonic waves from the transducer mounted on the
bottom of the boat. The transmitted ultrasonic waves advance straight towards
the seabed, but if there is an object, i.e. fish school or rocks, they will
reflect. Part of them will reflect back to the ship's bottom, which will then
be captured by the transducer. By measuring the time elapsed between
transmission and reception of ultrasound, the depth of the fish school will be
calculated.
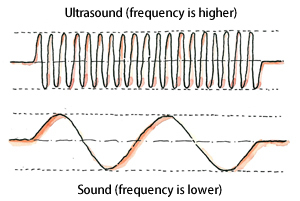
Topic 03 - Sound and Ultrasound
Both sound and ultrasound are, in principle, types of waves. They are just
like the ripples on the water surface you see when you drop a pebble into the
water. The water ripple normally spreads out 360 degrees, because of its
omni-directional characteristics. A fish finder utilizes high frequencies of
sharply focused ultrasound, which is transmitted with high voltage in order to
determine the direction fish schools are moving. Locating objects in the air
is different than locating objects underwater. To locate objects in the air,
we can utilize light, radio waves or sound. However, when locating objects
underwater, light and radio waves are attenuated rapidly when they travel
through water, which is why ultrasound is the most viable option to locate
underwater objects. Ultrasound has a high level of tolerance to underwater
attenuation. The propagation velocity of ultrasound under the water is
approximately 1,500 meters/sec, which is five times as fast as the propagation
velocity of ultrasound in the air (340 meters/sec). This propagation velocity
of ultrasound is used to calculate the depth at which a fish school is
located. For example, if an echo return from a fish school is observed one
second after it transmission, it can be construed that the fish school is
located at the depth of 750 meters under the boat (transmitted ultrasound hits
the underwater object and comes back in one second, when taking into
consideration the propagation velocity of ultrasound, namely 750 meters/sec,
you get the depth at which a fish school is located). This is the basic
echo-sounding principle of a fish finder.
Generally speaking, propagation
velocity is proportional to the density of the medium through which light,
radio waves or ultrasound travels. Light and radio waves can collect a lot of
information in a short period of time, while ultrasound is more time-consuming
with its underwater search. For example, ultrasound travels approximately
5,000 meters per second through a high-density medium such as iron. Although
propagation velocity of ultrasound underwater is slow, ultrasound is capable
of detecting information about fish schools at remarkably far distances.
There are various sources of interference that effect the propagation of
ultrasound underwater, including: current, water temperature, micro-organisms
(i.e. plankton), air bubbles, radio noise, etc. Despite these sources of
interference in the environment, a fish finder is capable of grasping the weak
echo returns from fish schools.
Sound and Ultrasound
A fish finder transmits ultrasonic waves from the transducer mounted on the
bottom of the boat. The transmitted ultrasonic waves advance straight towards
the seabed, but if there is an object, i.e. fish school or rocks, they will
reflect. Part of them will reflect back to the ship's bottom, which will then
be captured by the transducer. By measuring the time elapsed between
transmission and reception of ultrasound, the depth of the fish school is
calculated.
Topic 04 - Searchable angles and areas
Ultrasound is transmitted directly underneath the transducer, which is mounted
on the bottom of the boat. The transducer has its own directional
characteristics, that is, the characteristics of beams transmitted, which
affect the detection capability under the water. The directional
characteristics of the transducer are largely determined by the frequency of
the ultrasound transmitted and received by the transducer, and this affects
the searchable angles and areas.
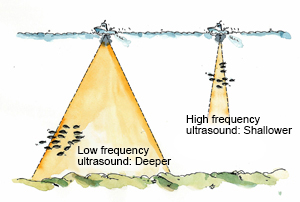
Frequencies commonly used by a conventional fish finder for recreational
boat are 50 kHz (low frequency) and 200 kHz (high frequency). A lower
frequency has a wider search angle and area. Generally, the searchable angle
of 50 kHz beams is approximately 50 degrees and that of 200 kHz beams is
approximately 15 degrees. The searchable areas by both kinds of the beams are
illustrated below. As you can see, lower frequency beams are suited for
wide-area-search at one instance, and higher frequency beams are suited for
narrow-area-search. Anglers can make use of these characteristics to find a
fish school.
Commercial fishermen also make use of these characteristics. They conduct a
search by low frequency (i.e., 15 kHz) beams first to grasp the general
locations of fish schools around the boat. Subsequently, they narrow the
search area for a fish school, using high frequency beams (200 kHz), to detect
the exact location of the fish school and operate the boat to be directly
above the targeted fish school.
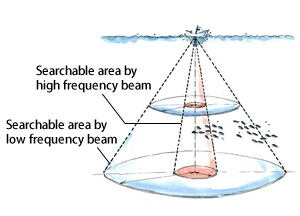
Interrelationship between
searchable angle and frequency of ultrasound
Searchable area is determined by the frequency of the ultrasound used.
While use of low frequency beams (50 kHz) facilitates a search of wider
area, use of high frequency beams (200 kHz) allows the operator to narrow
down the search area to detect the more precise location of a fish school.
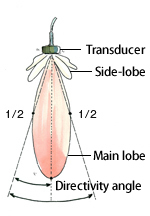
Directional characteristics
Inside the transducers, transducer elements are incorporated. The
transducer element transmits ultrasound through its vibration, which is caused
when it receives electric signals. How focused the ultrasound can be
transmitted wholly depends upon directional characteristics of the transducer
used. The figure on the left hand side shows how ultrasound is transmitted
from the transducer. The oval shape just below the transducer indicates signal
transmission intensity of ultrasound. The signal strength is the strongest on
the centerline of the oval shape, and the signal strength becomes weaker
towards the edges of the oval shape. Directivity angle of ultrasound can be
generated by connecting the transducer and the points where the signal
strength is half of the strongest signal (centerline).
Topic 05 - Various frequencies of ultrasound
Ultrasound frequency used by a fish finder generally ranges from 15 kHz to
200 kHz. However, the majority of the conventional fish finders oriented for
recreational craft utilize 50 kHz and 200 kHz. Such fish finders available in
the market incorporate electronic circuitry that can transmit and receive
ultrasound in these two frequencies. Also, a transducer mounted on the bottom of
the craft is configured to handle these two frequencies.
However, fish finders for professional use, i.e., those used by commercial
fishermen, can make use of other frequencies. Such frequencies include 15, 22,
28, 38, 45, 50, 68, 75, 88, 107, 150 and 200 kHz. There are some special fish
finders that utilize the frequency of 400 kHz, but it is quite a rare case. As
you can see, there is an extensive range of configurable frequencies available
for fish finders for fishery vessels, and a fish finder generally makes use of a
combination of two frequencies (high and low frequencies). The selection of the
frequencies depends upon the intended purposes of the fish finder, which
include, inter alia, finding specific fish species; grasping the seabed
condition; conducting a wide-area-search with the search angle of 90 degrees at
one go; conducting detailed search for fish schools; detecting fish schools that
give weak echo returns; avoiding interference/conflict with other fish finders
used nearby. The searchable range (depth) and search area are dependent upon the
frequency used. On the one hand, high frequency ultrasound is suitable for a
detailed search, although it cannot be used for search in deep water. Low
frequency ultrasound, on the other hand, is suited for general searches in a
wider area as well as searching in deep water.
Commercial fishermen also make use of these characteristics. They conduct a
search by low frequency (i.e., 15 kHz) beams first to grasp the general
locations of fish schools around the boat. Subsequently, they narrow the search
area for a fish school, using high frequency beams (200 kHz), to detect the
exact location of the fish school and operate the boat to be directly above the
targeted fish school
Detection range
Detection range (depth) of a fish finder depends upon the frequency used
for ultrasound transmission. In principle, the higher the frequency of
ultrasound, the shorter the propagation range can be. The wavelength of high
frequency ultrasound is short, and its directivity angle is narrow, which
enables detailed searches, but it attenuates significantly while travelling
through water. Low frequency ultrasound is characterised by its long
wavelength, wider directivity angle and high level of tolerance toward
underwater attenuation, hence enabling wide-area-searches in deeper water. To
summarize, you can choose low frequency if you are searching in deep water and
high frequency if you are conducting a detailed search in shallow water.
Further, when using low frequency ultrasound, you may be able to conduct more
precise deep-water searches by adding an optional Power Adapter, which
amplifies the transmitter power to a few kilowatts. Please note, however, that
when using the Power Adapter, a dedicated transducer capable of handling
higher transmitter power will be needed.
Difference in searchable range
between low and high frequency ultrasound
Basically, with low frequency (50 kHz) ultrasound, you can conduct
deep-water search, but with high frequency (200 kHz) ultrasound, the
searchable depth is not that deep.
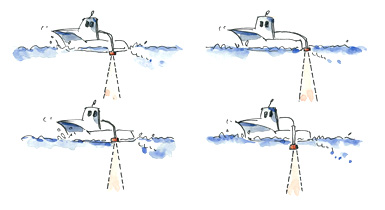
Topic 06 - Watch out for air bubbles
Air bubbles under water are the main nemesis to a fish finder. Ultrasound,
when transmitted, travels straight down towards the seabed. However, when the
ultrasound hits air bubbles on its way, the surface of the air bubbles reflect
it back and it cannot travel any further. Ultrasound is very vulnerable to air
bubbles. Even though ultrasound is transmitted with high transmission power, it
may be reflected by the surface of the air bubbles or be attenuated when going
through them. In such case, ultrasound may not reach fish schools in deep water
or the seabed, only showing a strong echo return from the air bubbles.
Such interference from air bubbles can easily be observed in the following
conditions:
- When your boat goes into another boat�s wake; or
- When your own boat goes astern.
In the latter case, a mass of air bubbles emanating from the propeller of the
boat will completely surround the bottom of the hull, making the passage of
ultrasound impossible.
Subsequently, a fish finder screen will only show the strong echo returns
from the air bubbles. If the interference from the air bubbles is weaker, a fish
finder screen can show a very fragmented view of the underwater condition.
When you find yourself in such a situation, the only way out is to escape
from the area affected by the air bubbles. A couple of ways to avert the adverse
effect of air bubbles include: taking into consideration the position where the
transducer is mounted; and avoiding to manoeuver the boat in astern direction.
If a fish school has been detected, it is advisable to let the boat continue on
its course for a while and then turn around to go back to the point where the
fish school was first detected. For those who are not used to using a fish
finder on board their boat, the general advice is to always control the boat in
a forward direction, when searching for a fish school.
Watch out for air bubbles
Air bubbles under water are the main nemesis to a fish finder. Air bubbles
underneath the transducer leads to poor or inexistent detection functionality in
a fish finder. This is especially true when the boat goes astern, creating air
bubbles that block ultrasound, resulting in poor performance.
Topic 07
- Are nearby vessels interfering with your fish finder?
When two or more echo sounders are operating in close proximity and at the
same or similar frequency, it is possible for each to receive false returns from
the others transducer. In such cases the operator will see noise and clutter,
false returns, dotted lines, multiple bottoms or other video anomalies on the
screen. This is most common in and around marinas or harbors where there may be
multiple fish finders operating at the same frequencies.
In order to get rid of interference, there are a couple of different
solutions to try; One way is to shift the frequency emitted from the fish
finder�s transducer, if possible, in order to avoid interference. Another way is
to turn on the interference removal function on your fish finder. Furuno fish
finders have interference rejection circuitry which can be used in such
instances, but use it sparingly to avoid eliminating small targets. Interference
rejection will automatically try to change your fish finder�s transmission
cycles, resulting in less interference.
Most of the time fish finder interference is caused by signals transmitted
from nearby boats, but in some cases it can also be caused by electronics on
your own boat. Make sure that your electronics are properly grounded, and avoid
running electrical cables alongside your transducer cable.
If previous solutions yield no results, you may try to manually change
between low and high frequency on your fish finder to see if the interference
disappears. If this still does not help, you may need to distance yourself from
other vessels.
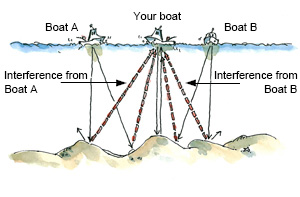
Interfering signals from nearby
vessels
Whenever other boats are close by, your fish finder might receive
interference. Diagonal lines and noise such as spots might appear, making the
video presentation difficult to read.
Topic 08 - About transducers
The physical device inside a transducer that creates the sound wave is a
piezoceramic disc called the element. The element, when voltage is applied,
vibrates - it distorts and reforms its shape in very rapid succession. This
vibration occurs at a specific frequency and creates compression waves, or
acoustic energy - sound waves. These waves travel outward from the element in a
vaguely cone-shaped pattern and encounter targets along the way.
As this acoustic energy encounters targets such as fish or bottom structure,
some of the beam will be attenuated (absorbed by the target), some will be
reflected back at the transducer as an echo and some will be scattered. As the
reflected echoes strike the transducer they cause a minuscule distortion in the
shape of the crystal. This distortion of the crystal creates a small fluctuation
of voltage, which can be detected and processed by the fish finder. The end
result is an image on your display.
By measuring the time from when the sound wave is generated to when the
return echo is received, we can learn the depth at which a target is
encountered. The strength of the reflected echo can tell us about the size and
density of the target. Some transducers are referred to as single-element
transducers. This means that they contain a single piezoceramic disc that
vibrates alternately at 50kHz and 200kHz, utilizing both operating frequencies.
When greater performance is desired or required, multiple element transducers
are available that can significantly enhance the performance and sensitivity of
your fish finder. A multiple-element transducer is one in which separate
elements vibrate individually at their respective frequencies. Some high-end
models utilize seven, nine or even fifteen 50kHz elements along with a
large-diameter 200kHz element. The dedicated 200kHz element offers enhanced
sensitivity in shallow water, while the greater surface area of the 50kHz array
will receive echoes from deeper water with much more clarity and detail.
There are some important points that are true for every transducer
installation. Acoustic noise is always present, and these sound waves can
interfere with your transducers operation. Ambient (background) noise from
sources such as waves, fish and other vessels cannot be controlled. However,
carefully selecting your transducers mounting location can minimize the effect
of vessel-generated noise from the propeller(s) and shaft(s), other machinery,
and other fish finders. The lower the noise level, the higher the gain setting
you'll be able to use effectively on your fish finder.
Always select a location where:
- Water flowing across the hull is smoothest with a minimum of turbulence
and bubbles
- The transducer will be continuously immersed in water (not applicable for
In-Hull models)
- There is a minimum of deadrise angle
- The transducer beam will not be obstructed by the keel or propeller
shaft(s)
- There is adequate headroom inside the vessel for the height of the
housing, tightening the nuts, and removing the valve assembly and insert
As a rule, no transducer should be located near a water intake or discharge
opening, directly aft of any lifting strakes, steps or other obstructions or
irregularities in the hull , or behind eroding paint (an indication of
turbulence). The flow of water across the transducer face must be as smooth as
possible in order to get the best performance while cruising.

Transducers used in smaller fish
finders
Most standard transducers are designed for recreational fish finders and
generally have a single element that resonates alternately at 50 and 200 kHz.
Although these transducers are effective and inexpensive, greater performance
can be had by matching your recreational fish finder with a high-performance
transducer. These transducers are rated for a greater power output and contain
an array of 50kHz elements along with one or more large-diameter 200kHz
elements. An array of 50kHz elements allows for a very tight beam pattern,
meaning there will be more energy on-target to produce return echoes. Also, the
greater surface area of this array makes the transducer more sensitive to return
echoes, enabling greater target resolution on the screen. The same is true of
having one large, dedicated 200kHz element - its tighter beamwidth and greater
sensitivity create a better performing transducer at all power outputs.
Topic 09 - About pulse waves
An electrical signal from the fish finder is applied to the transducer, which
sends out an acoustic signal - sound waves - into the water column. The
transducer receives the reflected echoes from objects that these sound waves
encounter and they are sent as an electrical signal to your fish finder. It is
the fish finder's job to process this signal into a picture of the underwater
world on your screen.
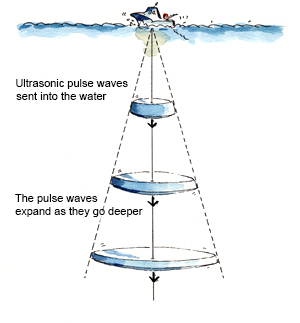
The transducer constantly alternates between transmitting ultrasonic pulse
waves and listening for echoes in the receiving mode at a very high speed.
Compared with the time the transducer is actively transmitting ultrasonic pulse
waves, the time spent 'listening' for echoes in the receiving mode is much
longer
Pulse wave
The transducer in the fish finder transmits ultrasonic pulse waves made up of
high pressure and low pressure pulses. The wavelength of each pulse is defined
as the distance between two successive high pressure pulses or two successive
low-pressure pulses. For example, when an electrical pulse is applied to a
200kHz transducer the element vibrates at a frequency of 200,000 cycles per
second � that is, 200,000 individual sound waves are transmitted from the
element each second. Short-wavelength, high frequency transducers produce sharp,
crisp images on the fish finder display.
Lower frequency wavelengths �see� deeper in the water column than higher
frequency wavelengths, and so a boost in power is not always necessary to detect
fish in deeper water. The lower in frequency that you go, the deeper the echo
sounder will see for the same amount of power. You can also increase the fish
finder�s detection range in all frequencies by using a narrower beam transducer.
A narrow beam delivers more energy on-target, resulting in stronger echoes,
improved target resolution, and the ability to �see� deeper into the water
column.
Topic 10 - Weak return echo
The transducer mounted on the underside of the boat transmits ultrasonic
waves or 'pulses' that travel down to the seabed. As the sound waves travel
through the water, they scatter and gradually lose strength. When these sound
waves hit either fish or plankton, they will bounce back up to the transducer.
The shape generated by a single fish and a fish school varies greatly, but when
ultrasonic waves hit a fish school they will bounce back in all different
directions. Parts of these reflected ultrasonic waves from the fish school will
return back to the transducer under the boat. If the distance to the seabed is
100 meters or less, the echo from the seabed will be much stronger than any fish
schools in between.
The reflected ultrasonic waves from the fish school will scatter on their way
back to the transducer making the signal very weak. This faint signal gets
picked up by the element inside the transducer, which in turn sends the
information to the main unit of the fish finder. The transducer of a fish finder
is a comparatively small thing, measuring only about 7-10 centimeters in
diameter for normal recreational vessels. Even though this diameter is small,
this is the area that receives the ultrasonic waves returning all the way from
the seabed.
The reflected ultrasonic waves from the fish school will scatter on their way
back to the transducer making the signal very weak. This faint signal gets
picked up by the element inside the transducer, which in turn sends the
information to the main unit of the fish finder. The transducer of a fish finder
is a comparatively small thing, measuring only about 7-10 centimeters in
diameter for normal recreational vessels. Even though this diameter is small,
this is the area that receives the ultrasonic waves returning all the way from
the seabed. What makes this job hard for the fish finder is that there is a lot
of noise in the water, and the echo from a fish is very weak. Out of all the
noise that gets generated by pollution, air bubbles, plankton and more, the fish
finder has to discern the reflected ultrasonic waves from a fish school. This is
especially true when it comes to fish schools that stay close to the seabed.
There is a lot of noise and it can be hard to discern what are fish schools and
what are not. At times like these, the built in noise removal functions in a
fish finder can come in very handy.
Weak echoes from a fish school
Ultrasonic waves usually hit the top of a fish, and depending on the angle
that the waves hit the fish the returning echo will change direction. The
returning echo will then scatter as it travels back to the surface, resulting in
a very weak signal that the transducer in the fish finder has to pick up.
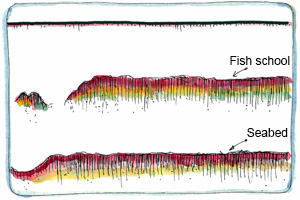
Topic 11 - Echo strength
Through the fish finder it is possible to identify the different sediments of
the seabed. The seabed generates a strong echo when hit by ultrasonic waves,
which is displayed on the fish finder screen as a red or brown line. When you
are out fishing you will notice that the amount of seabed displayed on your fish
finder changes depending on its hardness and composition.
The part of the seabed that gets displayed on the fish finder screen can
sometimes be called the �bottom trail� or �bottom band�. If the returning echo
from the seabed is strong, the amount displayed on the fish finder increases.
What this mean is that the bottom is hard and most likely consists of bedrock or
reefs.
The opposite is true for a soft seabed. When the seabed is soft the �bottom
band� will be very thin, due to the fact that the returning echo is weak. When
the returning echo is weak, the seabed likely consists of sandy soil or sand.
The amount of seabed displayed on the fish finder screen also depends on the
frequency used by the fish finder. Generally speaking, the �bottom band�
displayed will increase when using low frequency ultrasonic waves, and decrease
when using high frequency ultrasonic waves. If you wish to get a good view of
the seabed on your fish finder, it is recommended to set the fish finder to
50kHz, making it easier to judge the properties of the seabed.
When fishing for rockfish for example, it is very useful to be able to judge
the properties of the seabed since these fish prefer rock outcrops.
Bottom band
Rocky areas on the seabed will give of a strong echo, displayed prominently
on the fish finder display. The returning ultrasonic waves from the fish finder
will be displayed as a thick bottom. On the contrary, when the seabed is soft it
will be displayed as very thin line. This is due to the seabed absorbing a big
part of the ultrasonic waves emitted from the fish finder.
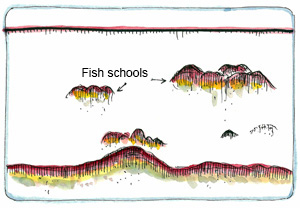
Topic 12 - Information displayed on the fish finder screen
Lets have a look at what kind of information gets displayed on a fish finder
screen. The image below shows a typical fish finder screen. A fish finder screen
usually displays the sea level, sea bottom and fish schools in between. Based on
the data received by the fish finder and the fish finder's settings, display of
the sea level, sea bottom and fish schools will vary in shape, concentration,
hue and distribution.
First of all, at the very top of the graph we see the minute marker, a thin
yellow line. This yellow line combined with the empty line following it
represents exactly one minute.
Right below the minute marker we find the transmission line. The transmission
line corresponds roughly with the sea level, so it can henceforth be considered
as the sea level. Strictly speaking, it denotes the position of transducer
transmitting ultrasonic pulse waves mounted on the underside of the boat. The
transmission line varies in size depending on which type of transducer is used
and what frequency the transducer is transmitting at. When the line is thick,
there is a risk that it might overlap fish schools close to the sea level,
making them hard to distinguish.
Below the transmission line is the water column, where fish schools swimming
around can be seen. When fish schools are detected by the fish finder, they can
be displayed in a variety of ways; like lumpy clouds, mountain or round shaped
formations, or as sporadic dots. One handy feature of the fish finder is the
ability to distinguish between normal protrusions on the seabed and fish schools
grouped close to the seabed. It is also possible to determine the location of
fishing lines hanging from your own boat, as show on the left side of the
illustration.
Close to the sea level on the right side of the illustration, we can see
plankton and what air bubbles (aeration) from the propeller looks like on the
fish finder screen.
Fish finders can also display the distance to seabed, range scale, ultrasonic
pulse wave frequency, A-scope mode and much more. Depending on the type of fish
finder, there are also functions that allow for GPS positioning, providing
longitude and latitude data of the own boat on screen.
Fish finder screen example
This illustration shows what a typical fish finder display looks like, with
information about the different fish schools swimming about, plankton,
individual fish, and fish schools close to the seabed. It also shows air bubbles
generated by the boat propeller and fishing lines beneath the boat.
Topic 13 - Fish finder configuration
Small to medium sized fish finders for pleasure boats usually come with a
main display unit and a transducer. Inside the main display unit we find the
circuitry for transmitting and receiving ultrasonic waves, as well as, circuitry
for processing the data to display information on screen amongst other things.
The transducer contains a small oscillator, a piezoceramic element, that sends
out ultrasonic pulse waves into the water column.
In order for communication between the transducer and the main unit to take
place, a cable is needed to connect them both. Electricity is also needed; the
power cord is attached to the main unit and then connected to the battery.
The main unit should be set up next to the ship controls on the helm to make
operation easy, while the transducer needs to be mounted properly. There are
several different mounting possibilities, which will be covered in the section
15. Transducers that are mounted on small sized pleasure boats are usually not
bigger than 3-7cm. The transducer is shaped like a nut with a bolt that can be
attached at the end. The length is roughly 12cm and when inserted through the
hull, it can be mounted properly by using the accompanying bolt to fasten it.
Fish finders for smaller pleasure boats and fishing boats usually come with
these two units included. Fish finders for larger pleasure boats and fishing
vessels can vary a little bit more in terms of what comes included, there might
be more parts and their design will differ slightly.
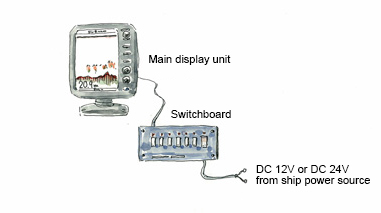
Topic 14 - Power supply
Fish finders and other electronics need electricity to function. On boats
electricity is supplied from the batteries installed in the battery compartment.
Excluding special super compact fish finders, most fish finders use DC 12-24
volt power supply. As long as the voltage is between 12 and 24 volt, the fish
finder unit will function properly. For exact details please look up the
respective product information sheet regarding your fish finder. Smaller boats
will usually come installed with one DC 12 volt battery, for boats with two DC
batteries in a serial connection 24 volt can be used.
The battery is connected to the main switchboard, and the power cable from
the fish finder is connected to the same switchboard. A common practice is to
install manual switches on the power cable in order to turn on or off the power
to the fish finder unit quickly. It is important to remember to first turn off
the fish finder unit before cutting the power, in order to avoid malfunctions.
For vessels utilizing 24 volt batteries, the fish finder should always be
attached to the switchboard first.
The capacity of a battery is predetermined (capacity being how much charge it
can deliver at a specific voltage). Larger batteries offer longer operational
time versus smaller batteries that can only keep the fish finder active for a
limited amount of time.
In order to know the capacity of the battery simply look at the packaging for
�AH�, meaning �Ampere Hour�.
Topic 15 - Mounting A Transducer
The transducer is mounted so that the oscillating elements inside are
vertical to the waterline. There are four common ways to mount a fish finder
transducer;
- Through Hull
- In-Hull / Shoot-Through
- Transom mount
- Side mount
The different ways listed here all have their unique advantages and
disadvantages, with the ideal mount being the first, Through Hull. This mount
consists of carefully cutting a hole in the bottom of the boat and fitting the
transducer inside, so that it is in direct contact with the water. Since the
transducer is mounted through the hull, the ultrasonic pulse waves and returning
echoes are very clear. However, the caveat is that you need to cut a hole
through the hull, which is something that deters a lot of boat owners.
This brings us to the next way of mounting transducers, In-Hull or
Shoot-Through mount.
In-Hull mounting means that the transducer is mounted against the hull of the
ship, fastened with silicon in a special case. This case is later filled with a
type of oil to make sure that the transducer is in full contact with the hull.
It is very important to choose a proper mounting location, otherwise air
turbulence from below the vessel might cause interference.
The downsides with In-Hull mounting is that first of all, it does not work
with vessels that have hulls made of aluminum, wood, steel or any material that
absorbs a lot of the ultrasonic pulse waves. Secondly, since the signals are
transmitted through the hull, a certain amount (20-50%) of the signal will get
lost, resulting in lower performance and ability to detect fish. Thirdly, for
those with fish finders sporting the �ACCU-FISH�� functionality, it is
recommended to mount the transducer using Through-Hull or Transom mount.
If the bottom detection function of recent FURUNO Fish Finders want to be
used, the transducer has to be mounted either through Transom mount or
Through-Hull.
Transom mount is common in smaller boats, the transducer is mounted below the
waterline at the transom. This way of mounting the transducer is popular due to
its simplicity, but it also runs the risk of interference from aerated water
originating from the propeller.
The fourth and final way to mount the transducer is side mount, which is an
improvised way where the transducer is mounted on a long pole. During travel to
and from fishing grounds, the pole is taken up from the water. The benefit here
is that for boat owners who do not wish to make proper Through Hull
installations, it offers good performance while being very simple.
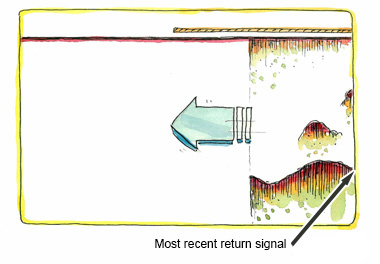
Topic 16 - How to read a fish finder screen
Returning echoes from the water below will show fish schools, the seabed and
plankton in color on the fish finder screen. However, what is actually shown on
the fish finder screen is not real images of these fish schools and plankton.
The image on the fish finder screen is the result of the returning echoes coming
from the seabed that pass through the transducer, through the reception
processing and image processing circuitry of the fish finder and then finally to
the screen. Depending on the echo strength, the color on the screen changes
accordingly, the stronger the echo the deeper the color.
In previous chapters, information on the fish finder screen has been
discussed, but not how the fish finder screen looks when in motion. The echoes
coming from the fish schools below are displayed according to the time received
by the fish finder in a sequential manner. The incoming signals are displayed
sequentially scrolling from the right side of the screen to the left. The right
side displays what the fish finder sees in that instant, and this data scrolls
to the left.
The data on screen is purposefully moving at a constant speed, scrolling from
the right to the left. The scrolling speed can be easily changed, making it easy
for the user to find a comfortable setting. When the scrolling speed is set to
high, even a small fish school will show up as a large echo on the fish finder
screen.
When connecting your fish finder to power, it is important to use separate
batteries for the engine generator and the fish finder if possible. The reason
for this is that there can be a lot of engine noise interfering with the signal
to the fish finder. In order to avoid unnecessary noise and interference, it is
advisable to install the power cable and transducer cable to the fish finder
separately.
Topic 17 - Individual fish and fish schools
Usually when spotting fish on a fish finder display, the fish is formed into
large fish schools. These fish schools show a great deal of variation when
displayed. Their shape can be said to resemble fluffy clouds, towering
thunderclouds and thin blurry formations.
This cloud like pattern depends on the species of fish, the behavior and the
way the fish schools swim through the water. The way individual fish and fish
schools are displayed on screen differs greatly, making it easy even for novice
fishermen to spot the difference.
For example, sardines tend to group together in very large and compact fish
schools. These fish schools will then get displayed accordingly, large with
intensive colors denoting concentration. Horse mackerel swim at a different
depth compared to sardines, but their way of forming schools is very similar.
Fish species that form schools vary considerably when it comes to shapes and
sizes, but the common element is that the fish finder display shows fish schools
in a bulging or protruding fashion.
Individual fish swimming about are very easy to identify since they have a
very distinct boomerang or half moon shape. When observing individual fish, one
can notice that they move around seemingly aimlessly flocking where they believe
food might be found.

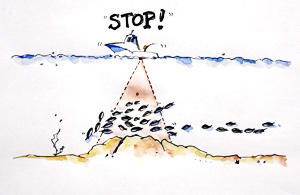
Topic 18 - Fish school display during mooring and brief
How do fish schools get displayed on the fish finder screen when the boat is
not in motion? Lets think of an example where your boat is at a standstill over
an area with large rocks.
The fish finder is in operation, and the image is sequentially streaming from
right to left. In the picture below to the right, we can see that at first there
is no indication of fish schools and then a fish school appears, swimming over
the rocky area.
For the sake of argument, lets assume that the fish school remains in the
same position while the boat is still. We will see the returning echo from the
fish school appear continuously from the right to the left, it will keep on
displaying the fish school in the same manner as long as it stays in the same
position.
Even though this fish school in reality looks like a large lump, on the fish
finder screen it looks like a large fish school. The rough seabed will also
appear as a smooth line since the boat is not moving. If one stays in this
position long enough, the fish school fills the entire fish finder screen and it
is easy to misinterpret as one enormous fish school.












{kind=link}